Torque sensors are critical perception components in robot joints, providing essential feedback for precise motion control and operational safety. To ensure their reliability, a comprehensive metrological evaluation, including uncertainty assessment, is imperative. This paper establishes a measurement and analysis methodology based on the deadweight torque standard machine, following the national verification regulation JJG 995-2005. The indication error of a torque sensor is measured, and the primary sources of measurement uncertainty—including repeatability, the standard machine's inherent uncertainty, and the sensor indicator's resolution—are quantitatively analyzed. The combined standard uncertainty and expanded uncertainty (with a coverage factor k=2) are calculated. For a 10 Newton-meter (Nm) measurement point, the relative expanded uncertainty is determined to be 0.08%. The results confirm the sensor's compliance with specifications and provide a validated framework for the uncertainty assessment of torque sensors in robotic applications, thereby supporting the pursuit of higher-precision robot control. This study not only demonstrates the practical application of uncertainty evaluation in torque sensors for robotics but also offers a methodological reference for manufacturers and researchers to enhance the accuracy and reliability of torque sensing systems in advanced robotic applications. The findings contribute to the development of more precise and safer robotic systems, particularly in fields such as medical robotics and high-precision assembly.
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited.
The rapid development of robotics technology is profoundly transforming modern manufacturing, service industries, and various aspects of human life. From large-scale industrial automation production lines to increasingly precise medical surgical robots, and to humanoid robots like Tesla's "Optimus," the role of robots has evolved from repetitive labor tools within isolated fences to collaborative partners capable of intelligent and flexible interaction with humans and the environment
[1]
Gerold, E., Antrekowitsch, H. A Sustainable Approach for the Recovery of Manganese from Spent Lithium-Ion Batteries via Photocatalytic Oxidation, International Journal of Materials Science and Applications. 2022, 11(3), 66-75.
. In this evolution, robot joints, as the core actuators for achieving precise motion, directly determine the robot's flexibility, accuracy, and dynamic response capabilities. High-precision joint control is highly dependent on the real-time and accurate perception of torque information
[2]
Liu, X., Sajda, P. Fusing Simultaneously Acquired EEG and fMRI via Hierarchical Deep Transcoding. In Proceedings of the International Conference on Brain Informatics 2023; Springer: Germany, 2023; pp. 57-67.
The torque sensor is the key component enabling this perception. It is directly integrated into the robot's joints or links to measure the torque exerted by joint drives or the external environment on the robotic arm in real-time
[3]
Liu, J. Standard Uncertainty of Torque Loading Device, Journal of Measurement. 2016, 37(2), 163-166.
. By sensing and feeding back torque signals, the control system can implement more complex force/position hybrid control, compliant control, and collision detection functions, thereby significantly enhancing the robot's task execution capability and the safety of human-robot collaboration
[4]
Rychtarova, J., Krupova, Z., Brzakova, M., Borkova, M., Elich, O., Dragounova, H., Seydlova, R., Sztankoova, Z. Milk quality, somatic cell count, and economics of dairy goat's farm in the Czech Republic. In Goat Science-Environment, Health and Economy; Kukovics, S., Ed.; IntechOpen: London, UK, 2021; pp. 14-16.
. Taking Tesla's latest generation Optimus robot as an example, it is reported to integrate approximately 14 sets of torque sensors for state perception, fully demonstrating the core position and widespread application of torque sensing in advanced robot architectures
[1]
Gerold, E., Antrekowitsch, H. A Sustainable Approach for the Recovery of Manganese from Spent Lithium-Ion Batteries via Photocatalytic Oxidation, International Journal of Materials Science and Applications. 2022, 11(3), 66-75.
However, it is a widely recognized fundamental fact in metrology that "all measurements are inevitably subject to error, and any measurement result can only approach the true value infinitely but never be completely equal to it"
[5]
Cozby, P. C., Bates, S. C. Methods in Behavioral Research, 12th ed.; McGraw-Hill: New York, NY, USA, 2012; pp. 14-16.
[5]
. For robot joint torque sensors, the reliability of their measurement results is affected by various uncertainty factors, including the sensor's own non-linearity and hysteresis, noise in the signal conditioning circuit, the resolution of the data acquisition system, parasitic loads generated during installation, and changes in environmental conditions (especially temperature)
[6]
Fidelus, J. D., Trych-Wildner, A., Puchalski, J., Weidinger, P. Study of a 2 kN·m Torque Transducer Tested at GUM and PTB, Including Creep Behaviour. Measurement Science Review, 2024, 24(1), 12-20.
. These factors collectively constitute the measurement uncertainty. In general industrial applications where only rough force control is performed, minor measurement deviations might be tolerable. However, in fields extremely sensitive to force control, such as medical robotics or high-precision assembly, tiny torque measurement deviations can lead to serious consequences, such as decreased surgical accuracy, product assembly failure, or even safety incidents
[4]
Rychtarova, J., Krupova, Z., Brzakova, M., Borkova, M., Elich, O., Dragounova, H., Seydlova, R., Sztankoova, Z. Milk quality, somatic cell count, and economics of dairy goat's farm in the Czech Republic. In Goat Science-Environment, Health and Economy; Kukovics, S., Ed.; IntechOpen: London, UK, 2021; pp. 14-16.
. Therefore, merely focusing on the static specifications of torque sensors (such as range and sensitivity) is far from sufficient; the quality of their measurement results—that is, the measurement uncertainty—must be systematically quantified and evaluated
[7]
Schicker, J., Wegener, G. Correct Measurement of Torque. Hottinger-Baldwin-Messtechnik (HBM). 2002.
[7]
.
Measurement uncertainty is internationally recognized as the core indicator for quantifying the credibility of measurement results
[8]
National Institute of Standards and Technology (NIST). Guidelines for Evaluating and Expressing the Uncertainty of NIST Measurement Results, NIST Technical Note 1297; 1994.
. According to the "Guide to the Expression of Uncertainty in Measurement" (GUM)
[9]
Joint Committee for Guides in Metrology (JCGM). Evaluation of measurement data — Guide to the expression of uncertainty in measurement, JCGM 100: 2008.
, systematically evaluating the uncertainty of torque sensors helps define the reliable boundaries of their measurement results, provides key data support for the robust design of control algorithms, and offers a more scientific and rigorous basis for conformity assessment when determining whether a product meets technical specifications. Currently, the performance evaluation and calibration of torque sensors are typically conducted on deadweight torque standard machines, following the national verification regulation JJG 995-2005 "Static Torque Measuring Devices"
[10]
JJG 995-2005, Static Torque Measuring Devices.
[10]
. Although scholars like Liu Jun
[3]
Liu, J. Standard Uncertainty of Torque Loading Device, Journal of Measurement. 2016, 37(2), 163-166.
has conducted useful explorations into the uncertainty of torque loading devices and calibration under varying temperature environments, existing research still lacks sufficient discussion on the systematic uncertainty analysis and evaluation throughout the entire measurement chain, particularly detailed exploration of the contributions of various uncertainty components for robotic application scenarios
[6]
Fidelus, J. D., Trych-Wildner, A., Puchalski, J., Weidinger, P. Study of a 2 kN·m Torque Transducer Tested at GUM and PTB, Including Creep Behaviour. Measurement Science Review, 2024, 24(1), 12-20.
Turlapati, S.H., Nguyen, V.P., Gurnani, J., Ariffin, M.Z.B., Kana, S., Wong, A.H.Y., Han, B.S., Campolo, D. Identification of Intrinsic Friction and Torque Ripple for a Robotic Joint with Integrated Torque Sensors with Application to Wheel-Bearing Characterization. Sensors. 2024, 24(23), 7465.
. The research will be based on a deadweight torque standard machine. Following the regulation, experiments will be conducted on the sensor to systematically identify, quantify, and synthesize key uncertainty components such as measurement repeatability, standard machine error, and resolution. The final outcome will be a standardized expression of the sensor's measurement result and its associated uncertainty. This study hopes to provide a clear and complete analytical paradigm for the metrological performance evaluation and accuracy assurance of robot joint torque sensors, laying a solid metrological foundation for their reliable application in high-precision robot control systems.
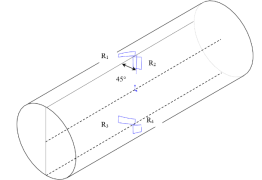
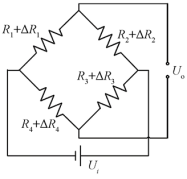
Figure 1. Schematic diagram of strain gauge bonding structure and Huygens circuit.
A conventional torque sensor utilizes strain gauges bonded to a torsionally elastic shaft. As shown in Figure 1a, four strain gauges are typically attached at 45° angles to the axis, forming a full Wheatstone bridge circuit (Figure 1b). This configuration is optimal because the principal stress directions under pure torsion are at ±45° to the axis, where the strain is maximal.
2.2. Working Principle
Under the action of torque, the principal stress direction is 45° and -45° from the axis direction, and the principal stress is numerically equal to the maximum shear stress. At this time, there is also a maximum tensile strain and compressive strain. By attaching strain gauges in the 45° and -45° directions and constructing a Huygens full bridge circuit, the corresponding resistance changes can be measured and output as weak voltage information. At this point, the corresponding relationship between torque and voltage can be constructed. When using a torque sensor to measure the output voltage, the torque it carries can be known, which is its working principle.
3. Measurement Principle
3.1. Metrology Standard
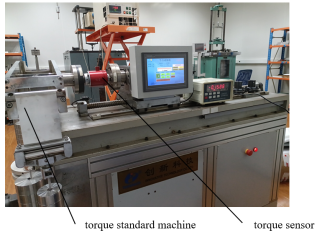
The traceability of instruments is usually tested using higher-level measurement standards, also known as metrological standards. For torque sensors, a deadweight torque standard machine is usually used for testing. The deadweight torque standard machine constructs the main source of torque based on force weight and balance arm length, and achieves the torque standard value by measuring the force weight and arm length. At present, high-precision deadweight torque standard machines can be left vacant within a range of ± 0.05%.
Figure 2. Deadweight torque standard machine in testing.
3.2. Metrology Process
Fix the torque sensor on the deadweight torque standard machine through flange connection. According to the national verification regulation JJG 995-2005 “Static Torque Measuring Devices”
[10]
JJG 995-2005, Static Torque Measuring Devices.
[10]
, five measurement points of 20%, 40%, 60%, 80%, and 100% capacity are selected within the maximum measurement capacity range. Usually, each measurement point is measured three times, and the average value is taken as the measurement result. Compare the measured value with the standard value to determine whether it is within the allowable error range.
4. Results Analysis of Measurement Uncertainty
4.1. Error Model of Measurement Uncertainty
Usually, the measurement indication error is obtained by subtracting the standard value of the deadweight torque machine from the measured value of the torque sensor. Therefore, the error model is shown in formula (1).
EN=NI-Ns(1)
Where, EN——the indication error of torque sensor;
NI——the indication of torque sensor;
Ns——the standard value of the deadweight torque machine.
4.2. Main Resources of Measurement Uncertainty
From the analysis of the propagation relationship of uncertainty, the uncertainty of indication error mainly comes from the standard uncertainty introduced by measurement repeatability error, the standard uncertainty introduced by deadweight torque standard machine, and the standard uncertainty brought by the resolution of torque sensor indicator.
During the testing process, the maximum range of 100 Nm deadweight weight torque standard machine was selected for experimental testing. Three measurements were taken at the 10 Nm measurement point, and the measurement results are shown in Table 1. Using the range method to calculate the standard deviation, in the case of n=3, C=1.69 is taken. Therefore, the introduction of standard uncertainty components for each influencing variable is shown in Table 2. So, the combined standard uncertainty could be calculated by formula (2).
(2)
Where, uc——combined standard uncertainty.
Table 1. The indication of torque sensor in repeatability.
Indication of torque sensor (Nm)
Average indication of torque sensor (Nm)
standard value of the deadweight weight torque machine (Nm)
9.9953
9.9972
10.0000
9.9964
10.000
Table 2. Main resources of uncertainty.
Introduced quantity
Calculation method
Standard deviation of introduced quantity (Nm)
Repeatability
0.0028
deadweight torque standard machine
0.0029
Indication resolution
0.00003
combined standard uncertainty
uc
0.0041
4.3. Result of Measurement Uncertainty
Usually, the factor k=2 is taken to calculate the expanded uncertainty and relative expanded uncertainty. For the torque sensor, the measurement result could be expressed as fellows, showing in Table 3.
Table 3. Measurement result of torque sensor.
Indication (Nm)
Standard value (Nm)
expanded uncertainty (Nm)
relative expanded uncertainty
9.9972
10
0.0082
0.08%, k=2
5. Conclusions
This paper has detailed a complete methodology for the calibration and uncertainty assessment of a robot joint torque sensor. The experimental results demonstrate that the sensor under test exhibits minor non-linearity but remains within its specified error limits when the measurement uncertainty is accounted for. The uncertainty analysis confirms that the dominant contribution is from the deadweight standard machine, while the effects of resolution are negligible.
The key outcomes of this work are:
1) A validated, practical framework for evaluating the metrological performance of torque sensors used in robotics.
2) A clear demonstration that the sensor's relative expanded uncertainty is below 0.1% across its operating range, meeting the requirements for precision robot control.
3) The provision of a traceable and defensible measurement result that can support quality assurance in robot joint manufacturing and integration.
For future work, it is recommended to investigate the effects of dynamic torque loading
[14]
Zhang, T., Li, H., Shi, Y., Wang, L., Zhang, X., Zhang, J., Wu, H. A novel joint external torque estimate model of the lightweight robot’s joint based on a BP neural network. Robotica. Published online: 04 February 2025.
, temperature variations, and different mounting conditions on the sensor's performance and uncertainty.
Abbreviations
GUM
Guide to the Expression of Uncertainty in Measurement
Nm
Newton meter
RV
Rotate Vector (a type of precision reducer)
Funding
This work was supported by department of science and technology of Zhejiang Province [Research and Industrialization of RV Reducer for Heavy Load Robot Joints No.2023C01066].
Conflicts of Interest
The authors declare no conflicts of interest.
References
[1]
Gerold, E., Antrekowitsch, H. A Sustainable Approach for the Recovery of Manganese from Spent Lithium-Ion Batteries via Photocatalytic Oxidation, International Journal of Materials Science and Applications. 2022, 11(3), 66-75.
Liu, X., Sajda, P. Fusing Simultaneously Acquired EEG and fMRI via Hierarchical Deep Transcoding. In Proceedings of the International Conference on Brain Informatics 2023; Springer: Germany, 2023; pp. 57-67.
Rychtarova, J., Krupova, Z., Brzakova, M., Borkova, M., Elich, O., Dragounova, H., Seydlova, R., Sztankoova, Z. Milk quality, somatic cell count, and economics of dairy goat's farm in the Czech Republic. In Goat Science-Environment, Health and Economy; Kukovics, S., Ed.; IntechOpen: London, UK, 2021; pp. 14-16.
Cozby, P. C., Bates, S. C. Methods in Behavioral Research, 12th ed.; McGraw-Hill: New York, NY, USA, 2012; pp. 14-16.
[6]
Fidelus, J. D., Trych-Wildner, A., Puchalski, J., Weidinger, P. Study of a 2 kN·m Torque Transducer Tested at GUM and PTB, Including Creep Behaviour. Measurement Science Review, 2024, 24(1), 12-20.
Schicker, J., Wegener, G. Correct Measurement of Torque. Hottinger-Baldwin-Messtechnik (HBM). 2002.
[8]
National Institute of Standards and Technology (NIST). Guidelines for Evaluating and Expressing the Uncertainty of NIST Measurement Results, NIST Technical Note 1297; 1994.
Joint Committee for Guides in Metrology (JCGM). Evaluation of measurement data — Guide to the expression of uncertainty in measurement, JCGM 100: 2008.
Turlapati, S.H., Nguyen, V.P., Gurnani, J., Ariffin, M.Z.B., Kana, S., Wong, A.H.Y., Han, B.S., Campolo, D. Identification of Intrinsic Friction and Torque Ripple for a Robotic Joint with Integrated Torque Sensors with Application to Wheel-Bearing Characterization. Sensors. 2024, 24(23), 7465.
Zhang, T., Li, H., Shi, Y., Wang, L., Zhang, X., Zhang, J., Wu, H. A novel joint external torque estimate model of the lightweight robot’s joint based on a BP neural network. Robotica. Published online: 04 February 2025.
Ma B, He X, Zhu Z, Xie F, Xiao Y, et al. Measurement Uncertainty Assessment of Torque Sensor in Robot Joints. Autom Control Intell Syst. 2026;14(1):1-5. doi: 10.11648/j.acis.20261401.11
@article{10.11648/j.acis.20261401.11,
author = {Binghui Ma and Xiangjun He and Zhonggang Zhu and Faxiang Xie and Yao Xiao and Yue Min and Wei Shen},
title = {Measurement Uncertainty Assessment of Torque Sensor in Robot Joints},
journal = {Automation, Control and Intelligent Systems},
volume = {14},
number = {1},
pages = {1-5},
doi = {10.11648/j.acis.20261401.11},
url = {https://doi.org/10.11648/j.acis.20261401.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.acis.20261401.11},
abstract = {Torque sensors are critical perception components in robot joints, providing essential feedback for precise motion control and operational safety. To ensure their reliability, a comprehensive metrological evaluation, including uncertainty assessment, is imperative. This paper establishes a measurement and analysis methodology based on the deadweight torque standard machine, following the national verification regulation JJG 995-2005. The indication error of a torque sensor is measured, and the primary sources of measurement uncertainty—including repeatability, the standard machine's inherent uncertainty, and the sensor indicator's resolution—are quantitatively analyzed. The combined standard uncertainty and expanded uncertainty (with a coverage factor k=2) are calculated. For a 10 Newton-meter (Nm) measurement point, the relative expanded uncertainty is determined to be 0.08%. The results confirm the sensor's compliance with specifications and provide a validated framework for the uncertainty assessment of torque sensors in robotic applications, thereby supporting the pursuit of higher-precision robot control. This study not only demonstrates the practical application of uncertainty evaluation in torque sensors for robotics but also offers a methodological reference for manufacturers and researchers to enhance the accuracy and reliability of torque sensing systems in advanced robotic applications. The findings contribute to the development of more precise and safer robotic systems, particularly in fields such as medical robotics and high-precision assembly.},
year = {2026}
}
TY - JOUR
T1 - Measurement Uncertainty Assessment of Torque Sensor in Robot Joints
AU - Binghui Ma
AU - Xiangjun He
AU - Zhonggang Zhu
AU - Faxiang Xie
AU - Yao Xiao
AU - Yue Min
AU - Wei Shen
Y1 - 2026/01/09
PY - 2026
N1 - https://doi.org/10.11648/j.acis.20261401.11
DO - 10.11648/j.acis.20261401.11
T2 - Automation, Control and Intelligent Systems
JF - Automation, Control and Intelligent Systems
JO - Automation, Control and Intelligent Systems
SP - 1
EP - 5
PB - Science Publishing Group
SN - 2328-5591
UR - https://doi.org/10.11648/j.acis.20261401.11
AB - Torque sensors are critical perception components in robot joints, providing essential feedback for precise motion control and operational safety. To ensure their reliability, a comprehensive metrological evaluation, including uncertainty assessment, is imperative. This paper establishes a measurement and analysis methodology based on the deadweight torque standard machine, following the national verification regulation JJG 995-2005. The indication error of a torque sensor is measured, and the primary sources of measurement uncertainty—including repeatability, the standard machine's inherent uncertainty, and the sensor indicator's resolution—are quantitatively analyzed. The combined standard uncertainty and expanded uncertainty (with a coverage factor k=2) are calculated. For a 10 Newton-meter (Nm) measurement point, the relative expanded uncertainty is determined to be 0.08%. The results confirm the sensor's compliance with specifications and provide a validated framework for the uncertainty assessment of torque sensors in robotic applications, thereby supporting the pursuit of higher-precision robot control. This study not only demonstrates the practical application of uncertainty evaluation in torque sensors for robotics but also offers a methodological reference for manufacturers and researchers to enhance the accuracy and reliability of torque sensing systems in advanced robotic applications. The findings contribute to the development of more precise and safer robotic systems, particularly in fields such as medical robotics and high-precision assembly.
VL - 14
IS - 1
ER -
Ma B, He X, Zhu Z, Xie F, Xiao Y, et al. Measurement Uncertainty Assessment of Torque Sensor in Robot Joints. Autom Control Intell Syst. 2026;14(1):1-5. doi: 10.11648/j.acis.20261401.11
@article{10.11648/j.acis.20261401.11,
author = {Binghui Ma and Xiangjun He and Zhonggang Zhu and Faxiang Xie and Yao Xiao and Yue Min and Wei Shen},
title = {Measurement Uncertainty Assessment of Torque Sensor in Robot Joints},
journal = {Automation, Control and Intelligent Systems},
volume = {14},
number = {1},
pages = {1-5},
doi = {10.11648/j.acis.20261401.11},
url = {https://doi.org/10.11648/j.acis.20261401.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.acis.20261401.11},
abstract = {Torque sensors are critical perception components in robot joints, providing essential feedback for precise motion control and operational safety. To ensure their reliability, a comprehensive metrological evaluation, including uncertainty assessment, is imperative. This paper establishes a measurement and analysis methodology based on the deadweight torque standard machine, following the national verification regulation JJG 995-2005. The indication error of a torque sensor is measured, and the primary sources of measurement uncertainty—including repeatability, the standard machine's inherent uncertainty, and the sensor indicator's resolution—are quantitatively analyzed. The combined standard uncertainty and expanded uncertainty (with a coverage factor k=2) are calculated. For a 10 Newton-meter (Nm) measurement point, the relative expanded uncertainty is determined to be 0.08%. The results confirm the sensor's compliance with specifications and provide a validated framework for the uncertainty assessment of torque sensors in robotic applications, thereby supporting the pursuit of higher-precision robot control. This study not only demonstrates the practical application of uncertainty evaluation in torque sensors for robotics but also offers a methodological reference for manufacturers and researchers to enhance the accuracy and reliability of torque sensing systems in advanced robotic applications. The findings contribute to the development of more precise and safer robotic systems, particularly in fields such as medical robotics and high-precision assembly.},
year = {2026}
}
TY - JOUR
T1 - Measurement Uncertainty Assessment of Torque Sensor in Robot Joints
AU - Binghui Ma
AU - Xiangjun He
AU - Zhonggang Zhu
AU - Faxiang Xie
AU - Yao Xiao
AU - Yue Min
AU - Wei Shen
Y1 - 2026/01/09
PY - 2026
N1 - https://doi.org/10.11648/j.acis.20261401.11
DO - 10.11648/j.acis.20261401.11
T2 - Automation, Control and Intelligent Systems
JF - Automation, Control and Intelligent Systems
JO - Automation, Control and Intelligent Systems
SP - 1
EP - 5
PB - Science Publishing Group
SN - 2328-5591
UR - https://doi.org/10.11648/j.acis.20261401.11
AB - Torque sensors are critical perception components in robot joints, providing essential feedback for precise motion control and operational safety. To ensure their reliability, a comprehensive metrological evaluation, including uncertainty assessment, is imperative. This paper establishes a measurement and analysis methodology based on the deadweight torque standard machine, following the national verification regulation JJG 995-2005. The indication error of a torque sensor is measured, and the primary sources of measurement uncertainty—including repeatability, the standard machine's inherent uncertainty, and the sensor indicator's resolution—are quantitatively analyzed. The combined standard uncertainty and expanded uncertainty (with a coverage factor k=2) are calculated. For a 10 Newton-meter (Nm) measurement point, the relative expanded uncertainty is determined to be 0.08%. The results confirm the sensor's compliance with specifications and provide a validated framework for the uncertainty assessment of torque sensors in robotic applications, thereby supporting the pursuit of higher-precision robot control. This study not only demonstrates the practical application of uncertainty evaluation in torque sensors for robotics but also offers a methodological reference for manufacturers and researchers to enhance the accuracy and reliability of torque sensing systems in advanced robotic applications. The findings contribute to the development of more precise and safer robotic systems, particularly in fields such as medical robotics and high-precision assembly.
VL - 14
IS - 1
ER -
 (2)
(2)