It has not been solved that the fruits, vegetables, strawberries, cells, blood and a bottle of liquor are damaged, broken during transportation. It is the greatest factor in this situation that there is a danger vibration frequency band where these are easy to scratch and are prone to death. If there are eigen frequencies within this danger frequency band, it needs that those eigen frequencies within this danger frequency band are moved out of the band. In the former paper, it was shown difficult to apply the existing topology optimization methods using homogenization method or density method to control plural eigen frequencies for solving this problem. Therefore in the former paper, it was proposed the so called “Interactive Energy Density Topology (IEDT) change method” that is a new high precision and high efficiency method for controlling plural eigen frequencies simultaneously referring to the kinetic and the strain energy density distributions. Here it is discussed more about the IEDT change method and show that it is sometimes difficult for the traditional methods to get solutions because especially in the dynamic problem, eigen frequencies may go up or down depending on its size even if reinforcement or hall for change topology is applied at the same location. But with the proposed IEDT change method, always it can be realized because the proposed method has wider solution spaces than the traditional one. Lastly, it is shown that this IEDT method is also very effective to reduce the integral value of response curve by frequency.
| Published in | International Journal of Mechanical Engineering and Applications (Volume 12, Issue 2) |
| DOI | 10.11648/j.ijmea.20241202.11 |
| Page(s) | 37-49 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2024. Published by Science Publishing Group |
IEDT Change Method, Frequency Response, Topology Optimization, Density Method, Index of Generalized Eigen Frequency, Kinetic Energy Density, Strain Energy Density, Danger Frequency Band
2.1. Application of Density Topology Optimization Method
2.2. The Proposed Method “Interactive Energy Distribution Topology (IEDT) Change Method”
 (2)
(2) 2.3. Attempt to Elucidate the Cause for Not Getting the Desired Results in the Previous Section
2.4. Application of Density Topology Optimization Method for Convergence Tasks
3.1. Control of Eigen Frequencies by IEDT Change Method
3.2. Further Consideration 1 of IEDT Change Method - Consideration Based only on Hole Installation
3.3. Further Consideration 2 of IEDT Change Method- Consideration Based only on Reinforcement
4.1. Assignment Settings
4.2. Consideration Regarding Response Integral Value Reduction Effect with IEDT Change Method
Integral value | 1st eigen frequency | Weight | |
|---|---|---|---|
Plate in Figure 1 | 0.27964 | 13.0Hz | 0.032369kg |
After optimization | 0.26322 | 13.0Hz | 0.034085kg |
Step1 | 0.53155 | 13.0Hz | 0.033448kg |
Step2 | 0.47889 | 13.2Hz | 0.034527kg |
Step3 | 0.38763 | 13.9Hz | 0.035606kg |
Step4 | 0.11831 | 16.4Hz | 0.037764kg |
Step5 | 0.07436 | 18.0Hz | 0.039922kg |
| [1] | Sasaki, T., Yang, Y., Hagiwara, I., Proposition of a New High Speed and High Efficiency Control Method for Plural Eigen Frequencies by Change Topology, International Journal of Mechanical Engineering and Applications 10(6), 2022-11, pp. 135-143. |
| [2] | Sasaki, T., Hagiwara, I., Proposition of an energy density topology change method for plural eigen frequencies control, Transactions of the JSME (in Japanese), Vol. 89, No. 927 (2023), |
| [3] | Bendsoe, M. P. and Kikuchi, N., Generating Optimal Topologies in Structural Design using a Homogenization method, Computer Methods in Applied Mechanics and Engineering, 71, (1988), pp. 197-224. |
| [4] | Suzuki, K. and Kikuchi, N., A homogenization method for shape and topology optimization, Computer Methods in Applied Mechanics and Engineering, Volume 93, (1991), pp. 291-318. |
| [5] | Ma, Z. D., Kikuchi, N., Cheng, H. C. and Hagiwara, I., Development of Structural Optimization Method for Vibration Reduction (1st Report, Structural Optimization Theory Using the Homogenization Method), JSME Series C, Vol. 59, No. 562 (1993-6), pp. 1730-1736 (in Japanese). |
| [6] | Tenek, L. H., Hagiwara, I., Static and Vibrational Shape and Topology Optimization Using Homogenization and Mathematical Programming. Computer Methods in Applied Mechanics and Engineering, 109, (1993) pp. 143-154. |
| [7] | Torigaki, T., Hagiwara, I., Kitagawa, Y., Ueda, M., Ma, Z. D., Kikuchi, N., Development and Application of a Shape-Topology Optimization System Using a Homogenization Method, SAE International Congress and Exposition. (1994-3). |
| [8] | Ma, Z. D., Kikuchi, N., Hagiwara, I., Torigaki, T., Development of Structural Optimization Method for Vibration Reduction, (2nd Report, An Improved Algorithm for the Optimization Problem), JSME Series C, Vol. 60, No. 577 (1994-9), pp. 3018-3024 (in Japanese). |
| [9] | Ma, Z. D., Kikuchi, N., Cheng, H. C., Hagiwara, I., Topological Optimization Technique for Free Vibration Problems, ASME Journal of Applied Mechanics, Vol. 62 (1995-3), pp. 201-207. |
| [10] | Hassani B., Hinton, E., A review of homogenization and topology optimization I—homogenization theory for media with periodic structure, Computers & Structures, Volume 69, Issue 6, December 1998, pp. 707-717. |
| [11] | Allaire, G., Cavallina, L., Miyake, N., Oka, T., Yachimura, T., The Homogenization Method for Topology Optimization of Structures: Old and New, JOURNAL FREE ACCESS, 2019 Volume 25 Issue 2 Pages 75-146. |
| [12] | Tenek, L. H., Hagiwara, I., Optimal plate and shell topologies using thickness distribution or homogenization, Computer Methods in Applied Mechanics and Engineering, Vol. 115 Nos. 1 & 2 (1994), pp. 111-124. |
| [13] | Fujii, D., Suzuki, K., Otsubo, H., Filtering method for topology optimization analysis using optimality criteria method, The Architectural Institute of Japan's Journal of Structural and Construction Engineering, No. 543(2001), pp. 105-112(in Japanese). |
| [14] | Kishida, M., Kurahashi, T., Consideration on numerical parameters in density update equation used in the density base topology optimization, Bulletin of the Japan Society for Computational Methods in Engineering, Vol. 21, Paper No. 03-211218 (2021), pp. 17-26 (in Japanese). |
| [15] | Nishio, Y., Liu, Y., Ono, N., Boundary shape identification method for density based topology optimization, Transactions of the JSME (in Japanese), Vol. 88, No. 914 (2022), |
| [16] | Mike, J. D., Powell, A., Direct search optimization method that models the objective and constraint functions by linear interpolation”, Proc. Sixth Workshop on Optimization and Numerical Analysis, Vol. 275, pp. 51-67, Kluwer Academic Publishers, Dordrecht, NL, 1994. |
| [17] |
COMSOL Multiphysics® v. 5. 5.
www.comsol.com . COMSOL AB, Stockholm, Sweden (2019). |
| [18] | Kozukue, W., Hagiwara, I., Vehicle Interior Noise Reduction Analysis Using Sound Pressure Level Integral Sensitivity, JSME, series C, Vol. 59, No. 568 (1993-12), pp. 3845-3851 (in Japanese). |
| [19] | Kozukue, W., Hagiwara, I., Vehicle Interior Noise Reduction Analysis Using Sound Pressure Level Integral Sensitivity, JSME, series C, Vol. 61, No. 586 (1995-7), pp. 2746-2752 (in Japanese). |
| [20] | Abe, A., Hagiwara, I., Development of New Sound Insulation Simulation Technology Using Finite Element Method for Efficiency of High Aspect Ratio Core in Low Frequency Range, International Journal of Mechanical Engineering and Applications, Vol. 10, No. 1 (2022-2), pp. 7-16. |
APA Style
Yang, Y., Sasaki, T., Abe, A., Hagiwara, I. (2024). The Outstanding Excellences of Interactive Energy Density Topology Change Method. International Journal of Mechanical Engineering and Applications, 12(2), 37-49. https://doi.org/10.11648/j.ijmea.20241202.11
ACS Style
Yang, Y.; Sasaki, T.; Abe, A.; Hagiwara, I. The Outstanding Excellences of Interactive Energy Density Topology Change Method. Int. J. Mech. Eng. Appl. 2024, 12(2), 37-49. doi: 10.11648/j.ijmea.20241202.11
AMA Style
Yang Y, Sasaki T, Abe A, Hagiwara I. The Outstanding Excellences of Interactive Energy Density Topology Change Method. Int J Mech Eng Appl. 2024;12(2):37-49. doi: 10.11648/j.ijmea.20241202.11
@article{10.11648/j.ijmea.20241202.11,
author = {Yang Yang and Toshie Sasaki and Aya Abe and Ichiro Hagiwara},
title = {The Outstanding Excellences of Interactive Energy Density Topology Change Method
},
journal = {International Journal of Mechanical Engineering and Applications},
volume = {12},
number = {2},
pages = {37-49},
doi = {10.11648/j.ijmea.20241202.11},
url = {https://doi.org/10.11648/j.ijmea.20241202.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ijmea.20241202.11},
abstract = {It has not been solved that the fruits, vegetables, strawberries, cells, blood and a bottle of liquor are damaged, broken during transportation. It is the greatest factor in this situation that there is a danger vibration frequency band where these are easy to scratch and are prone to death. If there are eigen frequencies within this danger frequency band, it needs that those eigen frequencies within this danger frequency band are moved out of the band. In the former paper, it was shown difficult to apply the existing topology optimization methods using homogenization method or density method to control plural eigen frequencies for solving this problem. Therefore in the former paper, it was proposed the so called “Interactive Energy Density Topology (IEDT) change method” that is a new high precision and high efficiency method for controlling plural eigen frequencies simultaneously referring to the kinetic and the strain energy density distributions. Here it is discussed more about the IEDT change method and show that it is sometimes difficult for the traditional methods to get solutions because especially in the dynamic problem, eigen frequencies may go up or down depending on its size even if reinforcement or hall for change topology is applied at the same location. But with the proposed IEDT change method, always it can be realized because the proposed method has wider solution spaces than the traditional one. Lastly, it is shown that this IEDT method is also very effective to reduce the integral value of response curve by frequency.
},
year = {2024}
}
TY - JOUR T1 - The Outstanding Excellences of Interactive Energy Density Topology Change Method AU - Yang Yang AU - Toshie Sasaki AU - Aya Abe AU - Ichiro Hagiwara Y1 - 2024/04/02 PY - 2024 N1 - https://doi.org/10.11648/j.ijmea.20241202.11 DO - 10.11648/j.ijmea.20241202.11 T2 - International Journal of Mechanical Engineering and Applications JF - International Journal of Mechanical Engineering and Applications JO - International Journal of Mechanical Engineering and Applications SP - 37 EP - 49 PB - Science Publishing Group SN - 2330-0248 UR - https://doi.org/10.11648/j.ijmea.20241202.11 AB - It has not been solved that the fruits, vegetables, strawberries, cells, blood and a bottle of liquor are damaged, broken during transportation. It is the greatest factor in this situation that there is a danger vibration frequency band where these are easy to scratch and are prone to death. If there are eigen frequencies within this danger frequency band, it needs that those eigen frequencies within this danger frequency band are moved out of the band. In the former paper, it was shown difficult to apply the existing topology optimization methods using homogenization method or density method to control plural eigen frequencies for solving this problem. Therefore in the former paper, it was proposed the so called “Interactive Energy Density Topology (IEDT) change method” that is a new high precision and high efficiency method for controlling plural eigen frequencies simultaneously referring to the kinetic and the strain energy density distributions. Here it is discussed more about the IEDT change method and show that it is sometimes difficult for the traditional methods to get solutions because especially in the dynamic problem, eigen frequencies may go up or down depending on its size even if reinforcement or hall for change topology is applied at the same location. But with the proposed IEDT change method, always it can be realized because the proposed method has wider solution spaces than the traditional one. Lastly, it is shown that this IEDT method is also very effective to reduce the integral value of response curve by frequency. VL - 12 IS - 2 ER -
Meiji Institute for Advanced Study of Mathematical Sciences, Meiji University, Tokyo, Japan
Meiji Institute for Advanced Study of Mathematical Sciences, Meiji University, Tokyo, Japan
Meiji Institute for Advanced Study of Mathematical Sciences, Meiji University, Tokyo, Japan
Meiji Institute for Advanced Study of Mathematical Sciences, Meiji University, Tokyo, Japan
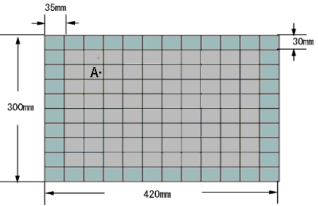
Figure 1. FEM model of test piece: 120 elements. Eigen frequencies from first to forth under simple support condition: 12.999Hz, 26.155Hz, 38.777Hz, 48.044Hz.
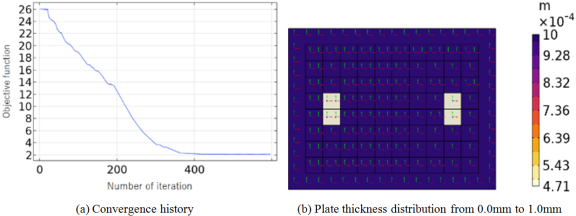
Figure 2. Results by conventional topology optimization using thickness distribution: Left: Objective function history; It converges around 400 iterations. Right: Final plate thickness distribution. The 2nd eigen frequency is 24.76 Hz and reaches the target. But the 3rd one is 38.39 Hz and does not reach the target.
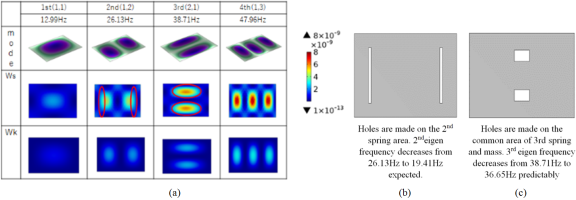
Figure 3. (a): 1st row from the top; 1st- 4th modes of the plate in Figure 2 under simple support condition. 2nd row from the top; 1st- 4th strain energy distributions. 3rd row from the top; 1st- 4th kinetic energy distributions. (b) Holes are made on the 2nd spring area. 2nd eigen frequency decreases from 26.13 Hz to 19.41 Hz as expected. (c) Holes are made on the common area of 3rd spring and mass. 3rd eigen frequency decreases from 38.71 Hz to 36.65 Hz contrary to expectations, predictably.
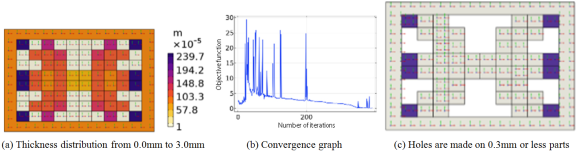
Figure 4. Results obtained through reinforcement: Left; thickness distribution from 0.0mm to 3.0mm when eigen frequencies (1st, 2nd, 3rd, 4th) converge to (12.393 Hz, 23.965 Hz, 40.764 Hz, 47.347 Hz). It reaches goal. Center; objective function history, the horizontal axis is the number of iteration, the vertical axis is the generalized eigen frequencies index. Right; holes are made on 0.3 mm or less parts and reinforcements are provided on 2.4 mm or more parts from plate thickness 1mm to 3mm. As a result, eigen frequencies (1st, 2nd, 3rd, 4th) become (11.937Hz, 23.551Hz, 35.577Hz, 44.413Hz). It leaves the goal again.
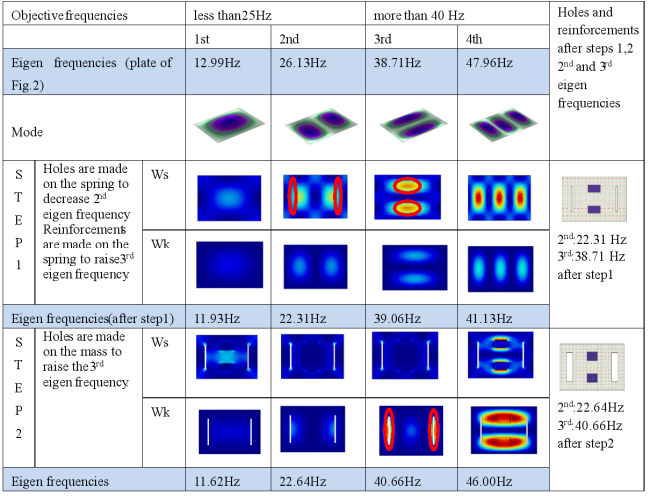
Figure 5. Results by interactive energy density topology change method: in step 1, holes are made on the red circle parts of 2nd eigen mode strain energy density distribution to decrease the 2nd eigen frequency. Reinforcements are provided on the red circle parts of 3rd eigen mode strain energy density distribution to raise the 3rd eigen frequency. As the result, eigen frequencies (1st, 2nd, 3rd, 4th) = (11.93 Hz, 22.31 Hz, 39.06 Hz, 41.13 Hz). 2nd eigen frequency reaches the target but 3rd one does not yet reach the goal. In step 2, holes are made. As the result, eigen frequencies (1st, 2nd, 3rd, 4th) = (11.62 Hz, 22.64 Hz, 40.66 Hz, 46.00 Hz). It reaches the goal.
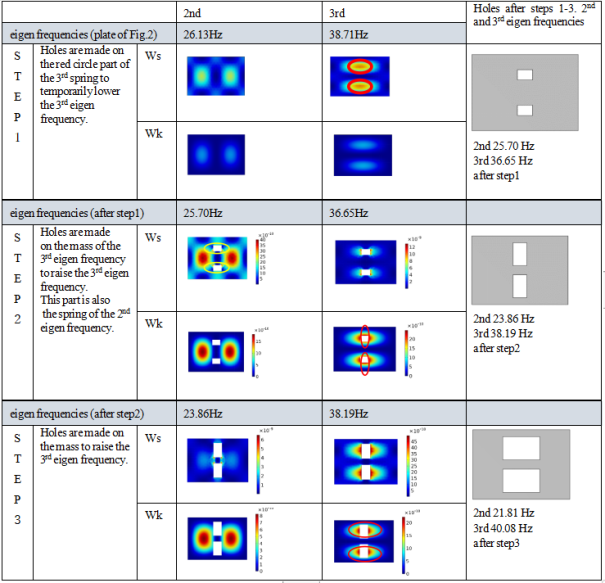
Figure 6. The achieved flow by interactive density topology change method to move all the eigen frequencies out of the danger frequency range with only 3 iterations. This has been achieved with just a set of holes which was not achieved by the traditional topology optimization method in 2·1.
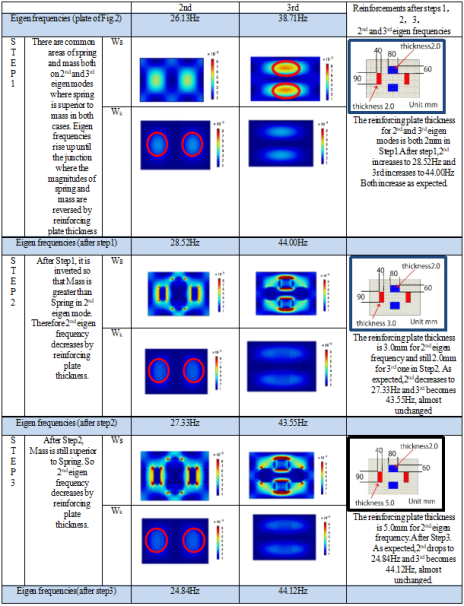
Figure 7. The achieved flow by interactive density topology change method to move all the eigen frequencies out of the danger frequency range with only 4 iterations. This has been achieved with just a set of reinforcements.
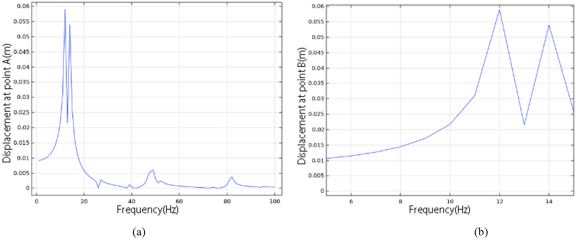
Figure 8. Displacement-frequency curve of point A on the plate in Figure 1.; (a): frequency range(0Hz-100Hz), (b): frequency range (5Hz-15Hz).
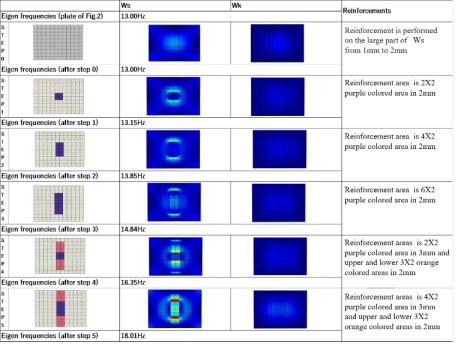
Figure 9. Reinforcement specifications based on Ws and at each step and the 1st eigen frequency after reinforcement.
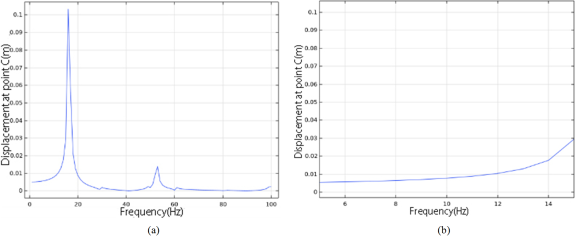
Figure 10. Displacement-frequency curve of point A on the plate in Figure 1 after step 4.; (a): frequency range (0Hz-100Hz), (b): frequency range (5Hz-15Hz).
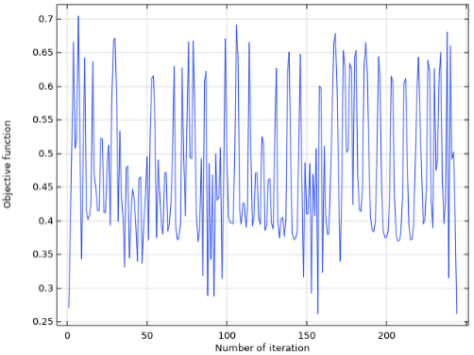
Figure 11. Convergence history.
Information

